
Navies have been doing hydrography — measuring and describing the physical characteristics of the navigable portion of the ocean — long before John Paul Jones and John Barry of the Continental Navy hoisted the ensign of the United States during the Revolutionary War. Their frigates charted depths with a weighted, hemp rope slung over the side and navigated using hand-drawn nautical charts.
Nautical display charts are still being developed today, except hydrography is now conducted on large 40-person vessels like the T-AGS class of ocean survey ships that sport multibeam sonars and collect digital bathymetric-type data to be processed later at onshore facilities.
It’s a manpower-intensive activity, but the work needs to continue apace as the Defense Department pivots to the Pacific. In recent years, however, Leidos has partnered with the US Navy to take the costly “manpower” portion out of the equation by automating undersea data collection using autonomous vessels.
The goal is to both replace and augment existing naval resources with an autonomous capability that improves navigation for ships and submarines through a better understanding of the characteristics of oceans and seas.
From Sea Hunter and Sea Hawk to autonomous hydrography
Demonstrations of autonomous naval systems are not new, and in May US Pacific Fleet stood up Unmanned Surface Vessel Division One to work on integrating such systems into the fleet. What is new is that development of autonomous surface vessels is now moving into a new phase where they can be built large enough to accommodate acoustic sensors for underwater mapping.
That’s due to the success of two earlier proof-of-concept DARPA programs executed by Leidos. The first was the Anti-Submarine Warfare Continuous Trail Unmanned Vessel, better known as Sea Hunter. At 132 feet long and displacing 135 tons, Sea Hunter is known by its trimaran configuration (two outriggers hanging from a central hull). In 2019, it distinguished itself by becoming the first vessel to autonomously navigate from San Diego to Pearl Harbor and back without a crew (except very short duration boardings by personnel from an escort vessel to check electrical and propulsion systems).
That demonstration vessel was followed by an upgraded version called Sea Hawk. This medium-displacement unmanned surface vehicle (MDUSV), the Navy designation for this class, has significantly increased capabilities compared to smaller USVs in terms of range, seakeeping, and payload capacity. It was designed to provide a forward-deployed and rapid-response asset that can show the way toward autonomy under the Navy’s Distributed Maritime Operations concept of operation.
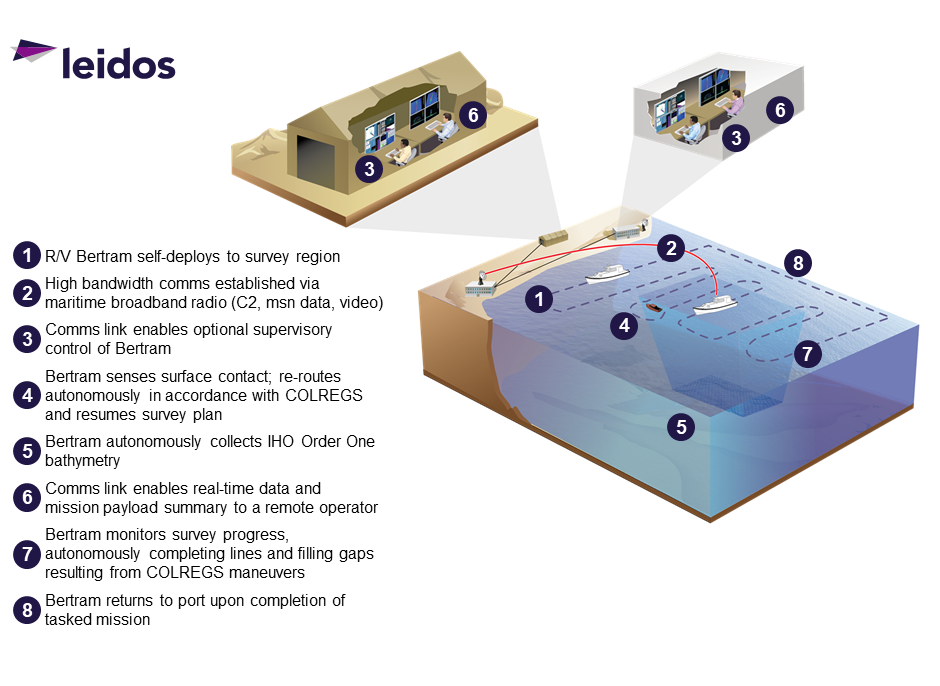
Now Leidos is taking the next step in autonomy — transitioning from autonomy for autonomy’s sake, which is, of course, a vital step in developing the capability, to adding a specific use case that proves its worth. Working under contract with both the Naval Meteorology and Oceanography Command and the Naval Oceanographic Office, both headquartered at Stennis Space Center, MS, Leidos will take a 45-foot boat named Bertram that was previously used to teach ocean survey to sailors and modify it for long-duration autonomous hydrography (LDAH).
“When you talk about unmanning something or executing a mission set in an autonomous way, the goal is to add a capability that lets you do something with an unmanned vessel that you couldn’t do with a manned vessel,” explained Dan Brintzinghoffer, vice president of the Leidos Maritime System Div. “Or you’re doing it for capacity as you can now do more of something for an extended period of time because essentially you’re saving money and reducing costs because you don’t have people onboard.
“Within that context, the mission is autonomously executing hydrographic surveys so you can create more charts and cover more distances for less money. That’s the bottom line — adding capacity.”
The Bertram is already equipped with state-of-the-art multibeam sonar for hydrographic mapping as part of its former training role, and once Leidos equips it with the necessary elements for autonomous operations, the vessel will begin its first missions in the Gulf of Mexico about one year from now.
Combining hydrography with autonomy
Hydrography is defined as the combination of oceanography (currents, waves, salinity, temperature, murkiness) and bathymetric measurements of bodies of water (water levels, underwater landforms, bottom type such as sand, rock, or coral). Combined together, they create a hydrographic survey that is typically consumed by sailors in the form of ENCs ((Electronic Navigational Charts) and displayed in multiple ways — from computer monitors to horizontal table-size displays. ENCs serve two purposes: safety of navigation for commercial and military vessels, and helping ship commanders to understand how they should maneuver and operate.
It is in the LDAH program that hydrography and autonomy will come together for the first time ever to produce ENCs.
“When you put the two together, you get this powerful capability to autonomously conduct hydrographic survey missions,” said EC Helme, program manager for Leidos’ Maritime Systems Div. “If we’re successful here, we’re literally doing exactly what the people would be doing, without the people. It’s a major goal for us to actually have the mission look exactly the same. I don’t want the Navy to have to change how they process data or have to change their operations. We want it to fit exactly in what they’re doing now, just autonomously.
“And in the case of this particular effort, this will be the first time on a larger vessel, meaning something other than a small boat, that anybody, as far as we’re aware, has integrated hydrographic survey equipment with autonomous controls.”
Connecting the sonar with the autonomous controls
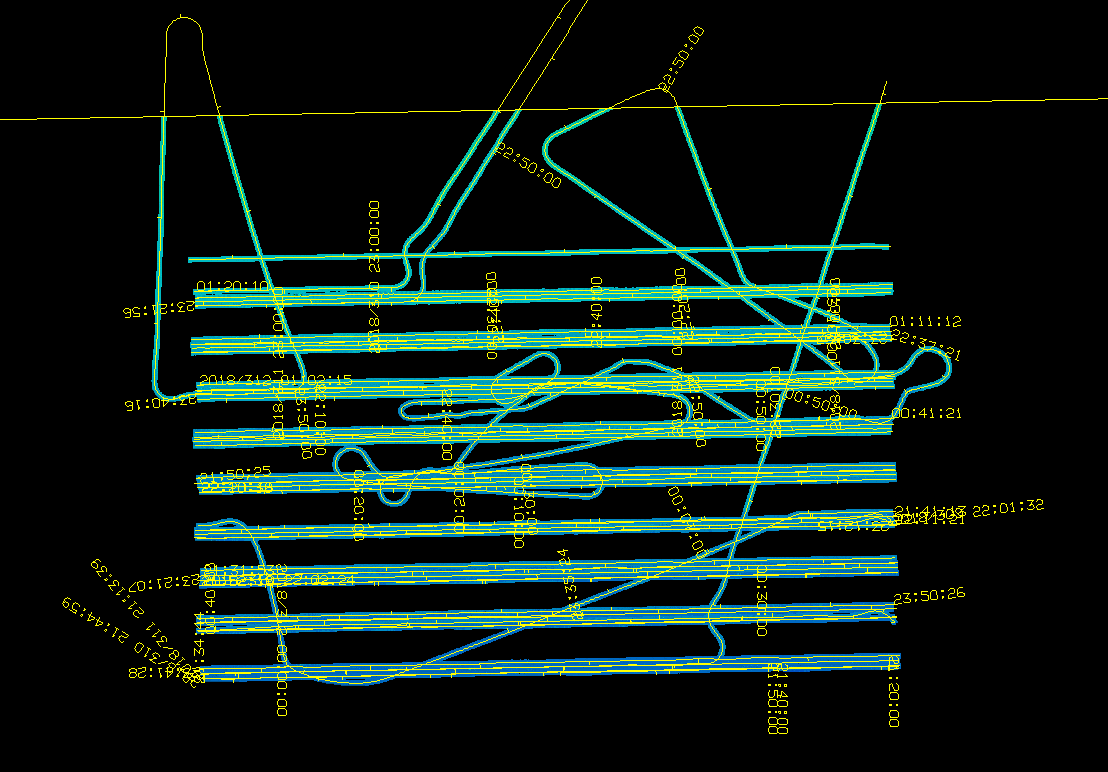
One of the more interesting aspects of the LDAH program is that data collected by the sonar will be used to direct the vessel’s autonomous controls to make sure the survey is being done properly and nothing is missed.
Sea Hunter and Sea Hawk have shown the ability to drive back and forth autonomously and have done so over approximately 50,000 miles, according to Leidos. The payloads on those vessels are independent of the controls of the ship. With the LDAH program, however, the payload is now going to feed information to the autonomy engine, which will allow it to more efficiently and effectively map a specific area.
“What’s unique about this is that the autonomy components are going to have additional inputs from the payload,” said Brintzinghoffer. “What I’m referring to is the fact that the acoustic data being collected from a sonar can sometimes get clouded because of a school of fish or something drifting underneath the sensor. For whatever reason, you’re collecting bad information. Typically, you wouldn’t know that until after you went back into port, downloaded the data, and started processing before realizing you have a half a mile of bad information. Then the question is, ‘do you send the ship back out to re-survey the specific area?’
“As part of LDAH, the autonomy will receive information from the hydrographic survey payload telling it that bad data was recorded and to re-survey a particular area. This is a significant increase in capability. And it’s a new capability.”
Cooperation between payload and autonomy will also occur when the vessel encounters a hazard such as another boat and has to move off its survey line. Sea Hawk and Sea Hunter, for example, sense the environment around them and maneuver to ensure that they comply with what’s called COLREGS (Convention on the International Regulations for Preventing Collisions at Sea).
However, it is inherently inefficient to force a boat conducting hydrography to move off its schedule of lines — just as it is inefficient to have to resurvey an area because of bad data. Similarly to how the sensor package and autonomy components work together for surveying, they will also combine to take the most efficient course of action without interrupting the survey when maneuvers are necessary.
“Maneuvering is great, we love it, we do it really well, we want to make sure we don’t collide with things,” said Helme. “A much better solution is for the two systems, the autonomy and the payload, to determine that if a maneuver is necessary to survey line 27, for example, then it would be more efficient to go directly to another line instead and go back later to 27. No maneuver would be needed; you’ll just continue to run your lines.
“That’s where we want to go, and that’s what’s so special about this LDAH program. We’re going away from just having to maneuver to actually influencing the path to accomplish the mission without having to maneuver. That’s the hard thing.”
Hydrography and autonomy to understand the theater of operations
Understanding the environment is the baseline for successful naval operations. Intelligence Preparation of the Operational Environment (IPOE) is the term that’s used as you’re preparing to operate in a given theater. In the world of maritime experts, it’s not uncommon to hear that the surface of Mars is better known than the undersea world.
According to the National Oceanic and Atmospheric Administration, “less than 10 percent of the global ocean is mapped using modern sonar technology (and) for the ocean and coastal waters of the United States, only about 35 percent has been mapped with modern methods.”
Most of that is in the littorals and once you depart from those areas, the vast majority of the world’s bodies of water are unmapped. That’s a challenge for the Navy, which needs to be able to operate in those areas along with others that are not typically trafficked.
With its pioneering work on Sea Hunter, Sea Hawk, and now LDAH, Leidos is significantly increasing a much needed capacity for data collection in order to fill major gaps in our knowledge and understanding of naval operating environments.
The US ocean survey mission right now is fulfilled by a handful of major T-AGS ships, and they will continue to conduct major ocean-survey missions. In Leidos’ view, however, it makes sense to disaggregate that capability into smaller, affordable autonomous platforms that reduce the cost of personnel, extend duration, and produce more and better charts for Navy missions.